GMAIL
» در صورت نیاز با آدرس الکترونیکی :
Sadegh.R7@GMAIL.COM
» با من در تماس باشید .
» در ضمن منتظر مقالات شما عزیزان هستم .
![]()
+ نوشته شده در 2007/10/21 ساعت 14:47 توسط صادق R
|
Sadegh.R7@GMAIL.COM
» با من در تماس باشید .
» در ضمن منتظر مقالات شما عزیزان هستم .
![]()
Sadegh_Monisa@Yahoo.com
» با من در تماس باشید .
» در ضمن منتظر مقالات شما عزیزان هستم .
![]()
پس از انتشار نقشه مربوط به فرستنده FM یک واتی در این وبلاگ عده ای از دوستان در ایمیل های خود تقاضای یک گیرنده مناسب و کم خرج FM نمودند، که من در تقاضای این دوستان مدار یک گیرنده FM ساده و با قدرت مناسب را که مدار داخلی رادیو های FM کوچک قدیمی بود و چندین سال پیش در کتاب الکترونیک به زبان ساده برای دانش آموزان 2 - تالیف آقای محمود بخت آور چاپ شده بود و از آنجا که من خودم آن را ساخته و از کارکرد آن مطمئن بودم برای این قسمت در نظر گرفتم.این مدار بسیار ساده بوده و در آن تنها یک سیم پیچ و یک RFC وجود دارند که کار ساخت دستگاه را آسان می کنند. بجای ترانزیستور C1923 می توانید از BF199 هم استفاده کنید.
آموزش در قالب یک فایل وورد orcad 9.2
متاسفانه این فایل با مشکل روبرو است.
نوین صنعت آرال،نصب راه اندازی سیستمهای بیسیم ، بیسیم ، سیستمهای مخابراتی ، مخابرات ، بیسیمهای دستی ، واکی تاکی ، بیسیم ثابت ، خرید و فروش انواع بیسیم ، حرفه ای ، آماتوری ، تامین قطعات بیسیم ، نصب دکل ، انواع دکل ، دکل مخابراتی ، ساخت دکل ، نصب راه اندازی سیستمهای امنیتی ، سیستم امنیتی ، ، مشاوره خرید و ، سیستمهای اداری ، فاکس ، نمابر ، پرینتر ، چاپگر ، تلفن بیسیم ، سانترال ، تلفنهای داخلی ، شرکتها و سازمانها ، سیستمهای صوتی ، طراحی شبکه ، شبکه کامپیوتری ، تهیه انواع بیسیم ، بیسیم خودرویی ، قرارداد,شرکت مهندسی نوین صنعت آرال ، نصب و راه اندازی بیسیمهای ارتباطی ، سازمانها ، گروه های مهندسی ، بیسیمهای دستی ، حرفه ای و آماتوری ، سیستمهای موقعیت یاب ، همگام با تکنولوژی روز دنیا ، طراحی شبکه های بیسیم ، واکی تاکی ، باند های فرکانسی اچ اف ، وی اچ اف ، یو اچ اف ، نت ، تعمیر و تامین قطعات ، آمپلی فایر ، برنامه نویسی نرم افزاری سیستمهای بیسیم ، بیسیمهای خودرویی ، دستی ، و ایستگاهی ، مرکزی ، فرکانس ، ماجولیشن ، پهنای باند ، میکسر ، آی اف ، نصب دکل و آنتن ، طول موج ، زاویه فرکانسی ، الکترومغناطیس ، الکترونیک ، مایکرو ویو ، بسامد ، نوسان ساز ، آی سی ، مقاومت ، خازن ، کامپیوتر ، مخابراتی ، ارتباطات ، جی پی اس ،
,NovinSanat,Aral,Aral,NSA_Co,GPS,HTML,JAVA,MODULATION,USB,LSB,CW,LF,HF,MF,IF,VHF,UHF,SHF,MICROWAVE,WAVE,,,LENGHT,AF,CT,CCT,TONE,FREQUENCY,EPROM,E2PROM,IC,VCO,LP,HP,LPF,HPF,MAGNETIC,,FIELD,BATTERY,WIRE,FUSE,RESISTORE,CAPACITORE,DIODE,COLLAPSING,ELLAPSING,COIL,FILTER,CIRCUIT,DIPOLE,MICROPHONE,SPEAKER,FLOW,INDUCTORE,TRANSISTORE,INTENSITY,ANTENNA,SELF,RLC,LC,RC,SOUND,PA,LSB,SSB,HZ.MHZ.GHZ,KHZ,73.62,163.72,LANMBDA,ENERGY,CPU,ROM,CTCSS.CCT,TERMENOLOGY,RECORDER,CURRNET,REPEL,STATIC,INSULATOR,OHM,WATT,AMPER,EMF,VOLTAGE,VOLT,DC,AC,PLATE,LOOP,COMMUTATOR,CYCLE,PARALLEL,SWITCH,FARAD,IMPEDANCE,INDUCTANCE,CHOKE,ANODE.CATHODE,PNP.NPN,BIAS,FEED BACK,GROUND WAVE ,SKY WAVE,TANK,TRUNK SYSTEM,OSCILLATORE,FULL-WAVE,RECTIFIER,POWER SUPPLY,LOW PAS FILTER , LTER,DESIGN,TELECOMMUNICATION,HENRY,DIGITAL,ANALOG,DECIMAL,HEXA,OCT,BIN,DEC,AND,OR,GATE,NOE,XNOR,SUBTRACTOR,MULTIPLEXER,FLIP-FLOP,RWM.RMM.EAROM,SIGNAL,LIMITER,STATION,RF,TONE,RADIO,SPECTRUM,TRANSMITTER,TRANSMISSION,TX-RX,RX,RECIEVER,AM,FM,PM,AUDIO,LOCAL,MASTER,IF,BUFFER,ENCODER,DECODER,TRF,MIXER,DETECTOR,RF GAIN,NETWORK,POWER OUPUT,P.L.L,PLL,AFC,AFT,TWT,GP300,GP328,KG109,KG107,TK768,GM950I,GM300,GP338,MOTOROLLA,KENWOOD,KYODO,ICOM,COLLINS,ROHDE,R&S,KG208,KG209,KG278,CARRIER,DSB,GOYA,PAYAM,GOYA630,SAMA 109,SAMA 107,SAMA 768 , RF 301 ,UHF601,555,RS232,MAX232,RF 2301,VRC,VHR SERIES400,ICR20,GSH34,PRC77,FM5B,FM10B,PRC66
برای عضویت تنها کافیست که نظر دهید و نام و پست الکترونیک خود را برای ما قرار دهید در اولین فرصت با شما تماس خواهیم گرفت تا بیشتر درباره مطالب الکترونیک در این وبلاگ مطلب قرار دهید .
Email: Saba_Aroodi@Yahoo.com
موفق باشید
،شرکت نوین صنعت آرال،نصب راه اندازی سیستمهای بیسیم ، بیسیم ، سیستمهای مخابراتی ، مخابرات ، بیسیمهای دستی ، واکی تاکی ، بیسیم ثابت ، خرید و فروش انواع بیسیم ، حرفه ای ، آماتوری ، تامین قطعات بیسیم ، نصب دکل ، انواع دکل ، دکل مخابراتی ، ساخت دکل ، نصب راه اندازی سیستمهای امنیتی ، سیستم امنیتی ، ، مشاوره خرید و ، سیستمهای اداری ، فاکس ، نمابر ، پرینتر ، چاپگر ، تلفن بیسیم ، سانترال ، تلفنهای داخلی ، شرکتها و سازمانها ، سیستمهای صوتی ، طراحی شبکه ، شبکه کامپیوتری ، تهیه انواع بیسیم ، بیسیم خودرویی ، قرارداد,شرکت مهندسی نوین صنعت آرال ، نصب و راه اندازی بیسیمهای ارتباطی ، سازمانها ، گروه های مهندسی ، بیسیمهای دستی ، حرفه ای و آماتوری ، سیستمهای موقعیت یاب ، همگام با تکنولوژی روز دنیا ، طراحی شبکه های بیسیم ، واکی تاکی ، باند های فرکانسی اچ اف ، وی اچ اف ، یو اچ اف ، نت ، تعمیر و تامین قطعات ، آمپلی فایر ، برنامه نویسی نرم افزاری سیستمهای بیسیم ، بیسیمهای خودرویی ، دستی ، و ایستگاهی ، مرکزی ، فرکانس ، ماجولیشن ، پهنای باند ، میکسر ، آی اف ، نصب دکل و آنتن ، طول موج ، زاویه فرکانسی ، الکترومغناطیس ، الکترونیک ، مایکرو ویو ، بسامد ، نوسان ساز ، آی سی ، مقاومت ، خازن ، کامپیوتر ، مخابراتی ، ارتباطات ، جی پی اس ،
,NovinSanat,Aral,Aral,NSA_Co,GPS,HTML,JAVA,MODULATION,USB,LSB,CW,LF,HF,MF,IF,VHF,UHF,SHF,MICROWAVE,WAVE,,,LENGHT,AF,CT,CCT,TONE,FREQUENCY,EPROM,E2PROM,IC,VCO,LP,HP,LPF,HPF,MAGNETIC,,FIELD,BATTERY,WIRE,FUSE,RESISTORE,CAPACITORE,DIODE,COLLAPSING,ELLAPSING,COIL,FILTER,CIRCUIT,DIPOLE,MICROPHONE,SPEAKER,FLOW,INDUCTORE,TRANSISTORE,INTENSITY,ANTENNA,SELF,RLC,LC,RC,SOUND,PA,LSB,SSB,HZ.MHZ.GHZ,KHZ,73.62,163.72,LANMBDA,ENERGY,CPU,ROM,CTCSS.CCT,TERMENOLOGY,RECORDER,CURRNET,REPEL,STATIC,INSULATOR,OHM,WATT,AMPER,EMF,VOLTAGE,VOLT,DC,AC,PLATE,LOOP,COMMUTATOR,CYCLE,PARALLEL,SWITCH,FARAD,IMPEDANCE,INDUCTANCE,CHOKE,ANODE.CATHODE,PNP.NPN,BIAS,FEED BACK,GROUND WAVE ,SKY WAVE,TANK,TRUNK SYSTEM,OSCILLATORE,FULL-WAVE,RECTIFIER,POWER SUPPLY,LOW PAS FILTER , LTER,DESIGN,TELECOMMUNICATION,HENRY,DIGITAL,ANALOG,DECIMAL,HEXA,OCT,BIN,DEC,AND,OR,GATE,NOE,XNOR,SUBTRACTOR,MULTIPLEXER,FLIP-FLOP,RWM.RMM.EAROM,SIGNAL,LIMITER,STATION,RF,TONE,RADIO,SPECTRUM,TRANSMITTER,TRANSMISSION,TX-RX,RX,RECIEVER,AM,FM,PM,AUDIO,LOCAL,MASTER,IF,BUFFER,ENCODER,DECODER,TRF,MIXER,DETECTOR,RF GAIN,NETWORK,POWER OUPUT,P.L.L,PLL,AFC,AFT,TWT,GP300,GP328,KG109,KG107,TK768,GM950I,GM300,GP338,MOTOROLLA,KENWOOD,KYODO,ICOM,COLLINS,ROHDE,R&S,KG208,KG209,KG278,CARRIER,DSB,GOYA,PAYAM,GOYA630,SAMA 109,SAMA 107,SAMA 768 , RF 301 ,UHF601,555,RS232,MAX232,RF 2301,VRC,VHR SERIES400,ICR20,GSH34,PRC77

"الکترونیک" به طیف گسترده ای ازالکتریسیته اطلاق می شود که با حرکت الکترونها در انواع مدارات نیمه هادی سر و کار دارد . اختراع ICها سبب آن شده است که دگر گونی های فراوانی در این علم پدیدار گشته و سیستمهای مدرن الکترونیکی از جمله مدارهای کنترل از راه دور ، ماهوارههای فضایی ، رباتها و ... را پدید آورد.
در حال حاضر الکترونیک کلید فتح شگفتیهای جهان است و با تمام علوم و فنون موجود به نحوی پیوند خورده است . از وسائل ساده خانگی تا پیچیده ترین تکنیک های فضایی همه جا صحبت از تکنولوژی فراگیر الکترونیکی است و امروز صنعت مدرن بدون الکترونیک و تکنولوژی های وابسته به آن عملا مطرود و از کار افتاده است .
پیشرفت علم الکترونیک و وسعت حوزه عملکرد آن امروز بر همگان روشن است. علاوه بر وسائل الکترونیکی از جمله دستگاههای مخابراتی مثل رادیو ،تلویزین ، ضبط صوت و تصویر ،انواع وسائل پزشکی ، صنعتی ،نظامی ، در دیگر وسائل غیر الکترونیکی هم ، کمتر وسیله ای را می توان یافت که الکترونیک در آن دخالتی نکرده باشد. از جمله در اتومبیل و صنایع حمل و نقل ، وسائل خانگی مثل ماشین لباسشوئی ، جاروبرقی و امثال آن نقش الکترونیک بسیار فعال و جالب توجه شده است.
با توجه به این مختصر می توان نتیجه گرفت که امروزه ، دیگر الکترونیک علم و یا تخصص ویژه افرا تحصیلکرده دانشگاهی و متخصصین این رشته نیست و بر همه افرادی که به نحوی با امور فنی درگیرند لازم است بفراخور حرفه خویش از این رشته اطلاعی داشته باشند.
مهندسان الکترونیک با خلق وعملکرد سیستمهای بسیار متنوعی سر وکار دارند که به منظور برآوردن نیازها و خواسته های جامعه طراحی می شوند. مهندسان الکترونیک در ایجاد ماشینهایی که تواناییهای بشر را در زمینه جسمی یاری و در زمینه محاسباتی افزایش می دهند نقش مهمی دارند . بخشی از طراحی و ایجاد سیستمهای الکترونیکی به توانایی ساخت مدلهای ریاضی اجزا و مدارهای الکتریکی بستگی دارد .برخی از مباحث پایه الکترونیک عبارتند از :
مدار های الکتریکی:
المان های الکتریکی
مقاومت
خازن
سلف
ترانسفورماتور
دیود
ترانزیستور
تقویت کننده عملیاتی
مبدلها
نمایشگر اعداد دیجیتالی (seven segment)
الف-تعریف سون سگمنت
1.ساعت دیجیتالی
2.ماشین حساب
3.ترازوی دیجیتالی
اطلاعاتی راجع به آیسی ها سری 74
تقویت کننده های عملیاتی OP_AMP
نمایشگر هفت قسمتی SEVEN SEGMENT
SCANNER "پویش گر" های رادیویی
سنسورهای فشار Load Cell Sensors
الگوریتم طراحی و ساخت یک روبات مسیر یاب
طراحی و ساخت یک سیستم تخمین سرعت موتور DC با استفاده از شبکه های عصبی
شمارنده سه رقمی با 7segment شمارنده سه رقمی با 7segment
مدار محاسبه فاصله از طریق امواج آلتراسونیک بوسیله میکروکنترلر
کنترل ساده یک LED توسط کامپیوتر
روبات دنبال کننده خط توسط سنسورهای مادون قرمز IR روبات دنبال کننده خط توسط سنسورهای مادون قرمز IR
قابل توجه دانشجویان الکترونیک دانشگاه اسلامشهر
برد گیرنده انواع کنترلهای تلویزیون و ویدئو سی دی (بزودی)
عکس هایی از روبات های مختلف مسیر یاب
گیرنده FM (مدار رادیو موج اف ام ) 100 در صد عملی
ساخت پروگرمر حرفه ای برای سری PIC (بزودی)
PPWIN a Parallel Port PIC Programmer (بزودی)
برنامهنویسی ساختار یافته PLC-زبان s5 (بزودی)
مطلبی در باب شبكه در اتوماسیون PLC (بزودی)
اتمام پروژه امپلی فایر (بزودی)
مدار مزاحم یاب تلفنی و... (بزودی)
کریستالها و اوسیلاتور ها (بزودی)
مدار خازن متر و مولد نویز (بزودی)
تکنولوژی stepper motor (بزودی)
مدار های الکترونیکی,نصب مدارهای الکتریکی,کنترل موس با میکرو,مدار فرستنده مادون قرمز, تعاریف سنسور گاز, 7 segment display مدار,امواج آلتراسونیک,ریپیتر,مدارات پری امپلی فایر, gm950i download,نقشه مدار سنسور آلتراسونیک,المان های الکتریکی,خازن الکتریکی,انواع آی سی, عملكرد ای سی 555 ,کنترل یک مدار ساده با کامپیوتر ,میکروکنترلر pic پروژه , سنسور آلتراسونیک , نقشه مدار الکترونیک بیسیم prc-77 ,المان های الكترونیكی , بخش if فرستنده مخابراتی؟ , pdf طراحی الگوریتم , لودسل ,المان مقاومت های الکتریکی , آموزش orcad ,, rs232 کنترل,روبات دنبال كننده خط توسط مادون قرمز, rf 301 , فرستنده باند رادیو آماتوری , نویز میکرو, تکرار کننده ,مدارات میکروکنترلر , نظریه های ایشتین ,خازن کریستالی,محاسبه فرکانس اچ اف,گیرنده fm آی سی,شکل مدار فرستنده ,فرستنده یو اچ اف , تلرانس سلف , op_amp کاربردها , eleele.blogfa.com , فروش gp338 , مقالات دانشجوئی, بیسیم prc-77 ,ساختمان داخلی دیود نوری,سنسور نوری مدارات ,دستورات انالوگ در بیس کام , cny70 چیست , آلتراسونیک سنسور , لودسل pdf , طراحی microwave lpf , گیرنده trf ,اکو چیست مدارهای مخابراتی , مدار عملی موس ,مواد منفجره کاربردها ,فیلم مبدلها ,نمایش اعداد روی 7segment ,نمایش اعداد دو رقمی روی 7segment , كنترل بزبان ساده مدار الكترونیك , پیچ ومهره صنعتی , مدارات تقویت کننده , دانشگاه اسلامشهر, مبدلها, تقویت کننده های الکتریکی, ماشین کاری الکتروشیمیایی, درباره repeater, کاربرد سنسور سرعت توسط میکروکنترلر, seven segment راهنما, 7 segment پایه ها, نقشه مدار شمارنده, اعداد رگولاتور,
،شرکت نوین صنعت آرال،نصب راه اندازی سیستمهای بیسیم ، بیسیم ، سیستمهای مخابراتی ، مخابرات ، بیسیمهای دستی ، واکی تاکی ، بیسیم ثابت ، خرید و فروش انواع بیسیم ، حرفه ای ، آماتوری ، تامین قطعات بیسیم ، نصب دکل ، انواع دکل ، دکل مخابراتی ، ساخت دکل ، نصب راه اندازی سیستمهای امنیتی ، سیستم امنیتی ، ، مشاوره خرید و ، سیستمهای اداری ، فاکس ، نمابر ، پرینتر ، چاپگر ، تلفن بیسیم ، سانترال ، تلفنهای داخلی ، شرکتها و سازمانها ، سیستمهای صوتی ، طراحی شبکه ، شبکه کامپیوتری ، تهیه انواع بیسیم ، بیسیم خودرویی ، قرارداد,شرکت مهندسی نوین صنعت آرال ، نصب و راه اندازی بیسیمهای ارتباطی ، سازمانها ، گروه های مهندسی ، بیسیمهای دستی ، حرفه ای و آماتوری ، سیستمهای موقعیت یاب ، همگام با تکنولوژی روز دنیا ، طراحی شبکه های بیسیم ، واکی تاکی ، باند های فرکانسی اچ اف ، وی اچ اف ، یو اچ اف ، نت ، تعمیر و تامین قطعات ، آمپلی فایر ، برنامه نویسی نرم افزاری سیستمهای بیسیم ، بیسیمهای خودرویی ، دستی ، و ایستگاهی ، مرکزی ، فرکانس ، ماجولیشن ، پهنای باند ، میکسر ، آی اف ، نصب دکل و آنتن ، طول موج ، زاویه فرکانسی ، الکترومغناطیس ، الکترونیک ، مایکرو ویو ، بسامد ، نوسان ساز ، آی سی ، مقاومت ، خازن ، کامپیوتر ، مخابراتی ، ارتباطات ، جی پی اس ،
,NovinSanat,Aral,Aral,NSA_Co,GPS,HTML,JAVA,MODULATION,USB,LSB,CW,LF,HF,MF,IF,VHF,UHF,SHF,MICROWAVE,WAVE,,,LENGHT,AF,CT,CCT,TONE,FREQUENCY,EPROM,E2PROM,IC,VCO,LP,HP,LPF,HPF,MAGNETIC,,FIELD,BATTERY,WIRE,FUSE,RESISTORE,CAPACITORE,DIODE,COLLAPSING,ELLAPSING,COIL,FILTER,CIRCUIT,DIPOLE,MICROPHONE,SPEAKER,FLOW,INDUCTORE,TRANSISTORE,INTENSITY,ANTENNA,SELF,RLC,LC,RC,SOUND,PA,LSB,SSB,HZ.MHZ.GHZ,KHZ,73.62,163.72,LANMBDA,ENERGY,CPU,ROM,CTCSS.CCT,TERMENOLOGY,RECORDER,CURRNET,REPEL,STATIC,INSULATOR,OHM,WATT,AMPER,EMF,VOLTAGE,VOLT,DC,AC,PLATE,LOOP,COMMUTATOR,CYCLE,PARALLEL,SWITCH,FARAD,IMPEDANCE,INDUCTANCE,CHOKE,ANODE.CATHODE,PNP.NPN,BIAS,FEED BACK,GROUND WAVE ,SKY WAVE,TANK,TRUNK SYSTEM,OSCILLATORE,FULL-WAVE,RECTIFIER,POWER SUPPLY,LOW PAS FILTER , LTER,DESIGN,TELECOMMUNICATION,HENRY,DIGITAL,ANALOG,DECIMAL,HEXA,OCT,BIN,DEC,AND,OR,GATE,NOE,XNOR,SUBTRACTOR,MULTIPLEXER,FLIP-FLOP,RWM.RMM.EAROM,SIGNAL,LIMITER,STATION,RF,TONE,RADIO,SPECTRUM,TRANSMITTER,TRANSMISSION,TX-RX,RX,RECIEVER,AM,FM,PM,AUDIO,LOCAL,MASTER,IF,BUFFER,ENCODER,DECODER,TRF,MIXER,DETECTOR,RF GAIN,NETWORK,POWER OUPUT,P.L.L,PLL,AFC,AFT,TWT,GP300,GP328,KG109,KG107,TK768,GM950I,GM300,GP338,MOTOROLLA,KENWOOD,KYODO,ICOM,COLLINS,ROHDE,R&S,KG208,KG209,KG278,CARRIER,DSB,GOYA,PAYAM,GOYA630,SAMA 109,SAMA 107,SAMA 768 , RF 301 ,UHF601,555,RS232,MAX232,RF 2301,VRC,VHR SERIES400,ICR20,GSH34,PRC77,FM5B,FM10B,PRC66
دریافت کل مقاله در 22 صفحه در فایل زیپ
تقدیم به مهندس نیما نیکرویی
لیزر
کلمه لیزر (laser) در واقع از حروف نخست کلمات Light Amplification by Stimulated Emission of Radiation که به معنی تقویت نور توسط گسیل القایی تابش است، گرفته شده است.
نگاه اجمالی
لیزر کشفی علمی میباشد که به عنوان یک تکنولوژی در زندگی مدرن جا افتاده است. لیزرها به مقدار زیاد در تولیدات صنعتی ، ارتباطات ، نقشه برداری و چاپ مورد استفاده قرار میگیرند. همچنین لیزر در پژوهشهای علمی و برای محدوده وسیعی از دستگاههای علمی ، موارد مصرف پیدا کرده است. برتری لیزر در این است که از منبعی برای نور و تابشهای کنترل شده ، تکفام و پرتوان تولید میکند. تابش لیزر ، با پهنای نوار طیفی باریک و توان تمرکزیابی شدید ، چندین برابر درخشانتر از نور خورشید است.
تاریخچه
انیشتین در 1917 میلادی نظریه گسیل القایی را بیان داشت و روابط مشهور جذب و نشر را به جهان عرضه نمود. بر پایه این تئوری چهل سال بعد ، تاونز و همکاران او ، نخستین تقویت کننده گسیل القایی را با بکار گیری آمونیاک مورد آزمایش قرار داده و سیستمی به اسم میزر پدید آوردند که در فرکانس 2.3X1011Hz کار میکرد.
دریافت کل مقاله در 22 صفحه در فایل زیپ
تقدیم به مهندس نیما نیکرویی
لیزر
واژه لیزر از سر کلمههای انگلیسی در عبارت Light Amplification by Stimulated Emission of Radiation به معنی «تقویت نور به روش گسیل القایی تابش» است.
لیزر به وسیلهای گفته میشود که نور را به صورت پرتوهای موازی بسیار باریکی که طول موج مشخصی دارند ساطع میکنند. این دستگاه از مادهای جمع کننده یا فعال کنده نور تشکیل شده که درون محفظه تشدید نور قرار دارد. این ماده پرتو نور را که به وسیله یک منبع انرزی بیرونی (از نوع الکتریسیته یا نور) به وجود آمده، تقویت میکند.
مبانی نظری لیزر را آلبرت ایشتین در سال ۱۹۱۶ میلادی طی مقالهای مطرح کرد٫ ولی سالهای نسبتاً زیادی طول کشید تا صنعث و فناوری امکان ساخت اولین لیزر را فراهم کند. در سال ۱۹۵۳ چارلز تاونز میزر (تقویتکننده موج میکروویو) را اختراع کرد و میخواست آزمایشات خود زا حول جایگزینی نور مرئی به جای مادون قرمز ادامه دهد و همزمان این امر بین آزمایشگاههای مختلف در سراسر جهان به عنوان رقابتی جدی در نظر گرفته شد که عبارت لیزر در همان زمان در مقالهای از گوردون هولد، دانشجوی دکترای دانشگاه کلمبیا، پیشنهاد شد و در سال ۱۹۶۰ اولین لیزر (که با موفقیت کار کرد) توسط تئودور میمن (Theodore H. Maiman) ساخته شد. و اولین لیزر گازی(با استفاده از هلیوم و نئون) هم توسط علی جوان فیزیکدان ایرانی در همان ۱۹۶۰ ساخته شد. نخستین بار طرح اولیه لیزر (میزر) توسط انیشتن داده شد،کار لیزر به این گونهاست که با تابش یک فوترون به یک ذره (اتم یا مولکول یا یون)برانگیخته یک فوترون دیگر نیز آزاد میشود که این دو فوترون با هم همفرکانس میباشند در صورت ادامه این روند تعداد نوترونها افزایش مییابند که میتوانند باریکهای از فوتونها را به وجود بیاورند.
کاربرد لیزر در پزشکی : چاقوی لیزری ، مته لیزری و ...
کاربرد لیزر در صنعت : جوشکاری لیزری ، برشهای لیزری ، برش الماس ، مسافت یاب لیزری و ...
کاربردهای نظامی : ردیاب لیزری ، تفنگ لیزری و ...
کاربردهای آزمایشگاهی و تحقیقاتی:اندازه گیری ، سنتز مواد و ...

فرستنده ویدئویی VHF
این مدار یک فرستنده ویدئویی است.
که با ولتاژ۹-۱۲ولت کار می کند.که می تواند تصویر را تبدیل به امواج تلوزیونی کند ودر فرکانس VHF پخش کند.
از این مدار می توان در دوربین های بی سیم استفاده کرد.همان طور که در نقشه مشخص است،فیش J1 به ورودی تصویر ، فیش J2 به ورودی صدا وJ3 به خروجی وصل می شود

 جهت راحتی دوستان ، مطالب به صورت فایلهای PDF تهیه شده است .در صورت امکان با برنامه های دانلود نظیر DAP فایلها را دریافت نمائید .شما هم می توانید مقالات خود را برای استفاده دیگران برای ما بفرستید تا با نام خودتان در سایت قرار داده شود .
جهت راحتی دوستان ، مطالب به صورت فایلهای PDF تهیه شده است .در صورت امکان با برنامه های دانلود نظیر DAP فایلها را دریافت نمائید .شما هم می توانید مقالات خود را برای استفاده دیگران برای ما بفرستید تا با نام خودتان در سایت قرار داده شود .| هدایت روبات موبایل توسط کنترل کننده فازی با هدف مانع گریزی و هدف گرایی در محیط های پیچیده
عنوان مطلب : هدایت روبات موبایل توسط کنترل کننده فازی با هدف مانع گریزی و هدف گرایی در محیط های پیچیده فرستنده : حامد مظاهری تاریخ : 7 شهریور 1386 پسورد مورد نیاز برای باز کردن فایل : www.ir-micro.com hamed@ir-micro.com برای دریافت بر روی لینک زیر کلیک کنید جهت راحتی دوستان ، مطالب به صورت فایلهای PDF تهیه شده است .در صورت امکان با برنامه های دانلود نظیر DAP فایلها را دریافت نمائید .شما هم می توانید مقالات خود را برای استفاده دیگران برای ما بفرستید تا با نام خودتان در سایت قرار داده شود .hamed@ir-micro.com
www.ir-micro.com وب سایت جامع الکترونیک ، برق و کامپیوتر |
جهت راحتی دوستان ، مطالب به صورت فایلهای PDF تهیه شده است .در صورت امکان با برنامه های دانلود نظیر DAP فایلها را دریافت نمائید .شما هم می توانید مقالات خود را برای استفاده دیگران برای ما بفرستید تا با نام خودتان در سایت قرار داده شود .
جهت راحتی دوستان ، مطالب به صورت فایلهای PDF تهیه شده است .در صورت امکان با برنامه های دانلود نظیر DAP فایلها را دریافت نمائید .شما هم می توانید مقالات خود را برای استفاده دیگران برای ما بفرستید تا با نام خودتان در سایت قرار داده شود .عنوان مطلب : طراحی و ساخت یک سیستم تخمین سرعت موتور DC با استفاده از شبکه های عصبی
فرستنده : حامد مظاهری
تاریخ : 28 تیر 1386
پسورد مورد نیاز برای باز کردن فایل : www.ir-micro.com
hamed@ir-micro.com
برای دریافت بر روی لینک زیر کلیک کنید
hamed@ir-micro.com
www.ir-micro.com
وب سایت جامع الکترونیک ، برق و کامپیوتر
را فشار دهید.یک شماره به 7segmentها اضافه خواهد شد.تا اینکه رقم 999 ایجاد شود.پس از آن اگر کلید را فشار دهید.هر سه 7segment عدد صفر را نشان خواهند داد.دکمه Reset نیز در این مدار وجود دارد.که با فشار دادن آن هر مرتبه در هر جای شمارش که باشید هر سه 7segment عدد صفر را نشان خواهند داد.
پایه های 9 تا 15 آیسی 4511 خروجی های a,b,c,d,e,f,g به 7segment است.،هر کدام از این پایه ها با مقاومتهای 330 اهم به 7segment اتصال دارند.پایه های a,b,c,d,e,f,g 7segment در کنار آن در نقشه مشخص شده اند.هر کدام از پایه های یکسان را در سه 7segment به هم متصل کنید.به طور مثال پایه های a هر 7segment را به هم متصل کنید این کار را برای تمامی پایه های هر 7segmen انجام دهید.
پایه وسطی هر 7segment پایه مشترک آن است.همانطور که در نقشه می بینید.در کنار این پایه عبارتی نوشته نشده است.تا این پایه تحریک نشود.7segment روشن نخواهد شد.تحریک این پایه می تواند با ولتاژ صفر یا پنج ولت انجام شود.اگر تحریک آن با ولتاژ صفر باشد.از نوع کاتد مشترک است.و اگر با ولتاژ مثبت 5 ولت باشد از نوع آند مشترک است.در این مدار از نوع کاتد مشترک استفاده کنید.تحریک این پایه توسط 3 عدد ترانزیستور BC557 انجام می گیرد.این ترانزیستور از نوع pnp است.،کلکتور آنرا به منفی منبع تغذیه وصل کنید.امیتر آنها را نیز به مشترک سه 7segment وصل کنید نحوه اتصال در نقشه کاملا مشخص است.بیس این ترانزیستور ها با سه عدد مقاومت 4.7 کیلو اهم از طریق پایه های 2و1و15 آیسی 4553 تحریک می شوند.
اگر به نقشه نگاه کنید.،پایه های1و7و2و6 آیسی 4511 که معرف A,B,C,D هستند.توسطQ0,Q1,Q2,Q3 آیسی 4553 تحریک می شوند.آیسی 4553 هر کلاکی را که در پایه 12 توسط فشردن کلیدpush-bottom دریافت می کند.به عددی باینری در پایه های Q0,Q1,Q2,Q3 تبدیل می کند.این پایه ها نیز به پایه های A,B,C,D آیسی 4511 که یک مبدل BCD باینری به 7segment است.،متصل می باشد.و این دلیل مشاهده اعداد بر روی 7SEGMENTاست.
زمانیکه شما منبع تغذیه را به این مدار وصل می کنید.هر سه 7segment عدد صفر را نشان می دهند.،حال اگر کلید push-bottom مربوط به پایه پالس(clock) را فشار دهید اولین 7segmentدر سمت راست برد مقدار یک را نشان می دهد.همانطور که گفته شد.،زمانیکه این کلید را فشار می دهید.عدد باینری 0001 در پایه های Q0,Q1,Q2,Q3 ایجاد می شود.این عدد باینری در پایه های A,B,C,D آیسی 4511 ایجاد می شود.این آیسی این عدد را به عدد0000110 در پایه های a تا g آیسی 4511 تبدیل می کند.ان عمل تا شماره 10 به همین صورت انجام می گیرد.در 9 حالت قبل پایه DS1 آیسی 4511 تحریک می شد.وقتی به عدد 10 می رسیم حال پایه DS2 آیسی4511 نیز تحریک می شود.در واقع وقتی به عدد 100 نیز می رسیم پایه DS3 تحریک می شو د.
علت اینکه اعداد بر روی 7segmentها باقی می مانند به دلیل وجود پایه latch در آیسی 4553 است.که مانند حافظه ای مقادیر قبلی و فعلی را جهت نمایش بر روی 7segment ها نگاه می دارد.این پایه،پایه 10 آیسی4553 است.که توسط مقاومت 1 مگااهم به منفی منبع تغذیه بر روی برد بورد وصل شده است.
حال به پایه های Reset,Clock و نحوه تحریک آنها می پردازیم.تحریک این پایه ها توسط آیسی 4093 که یک آیسی NAND است.،صورت می گیرد.پایه های 1و2 این آیسی را به هم وصل کنید.از اشتراک پایه های 1و2 آیسی 4093 با یک مقاومت 470 کیلو اهم به منفی منبع تغذیه و از همان اشتراک با یک خازن 10 نانو فاراد به مثبت منبع تغذیه بر روی برد بورد وصل کنید.از همان اشتراک به یک سر کلید push-bottom ,سر دیگر این کلید را بر روی برد بورد به مثبت منبع تغذیه وصل کنید.حال پایه 3 آیسی4093 به پایه clock آیسی 4553 وصل کنید.در قسمت reset نیز به همین صورت عمل کنید.پایه های 5 و 6 آیسی را نیز به هم وصل کنید از اشتراک این اتصال مانند حالت قبل به یک مقاومت 470 کیلو اهم وصل کنید و سر دیگر این مقاومت را به منفی منبع تغذیه وصل کنید.از اشتراک پایه ه های 5و6 آیسی 4093 با یک خازن 10نانو فاراد به مثبت منبع تغذیه وصل کنید.باز از همان اشتراک به یک سر کلید push -bottom دیگر وصل کنید.،وسر دیگر این کلید را به مثبت منبع تغذیه وصل کنید.حال پایه های 8و9 را به هم وصل کنید و این اشتراک به پایه 4 آیس 4093 متصل نمایید.پایه 10 آیسی 4093 را به پایه RST آیسی 4553 وصل کنید.پایه RST را با یک مقاومت 100 کیلو اهم به منفی منبع تغذیه وصل کنید.پایه های 4و3 آیسی 4553 را با یک خازن یک نانو فاراد به یکدیگر متصل نمایید.
پایه های تغذیه مثبت و منفی این سه آیسی را به طور صحیح وصل کنید.در آیسی 4511 تعذیه مثبت پایه 16 وتغذیه منفی پایه 8 است.در آیسی 4553 تغذیه مثبت پایه 16 و تغذیه منفی پایه 8 است.در ایس 4093 تغذیه منفی پایه 7 وتغذیه مثبت پایه 14 است.
پایه11 آیسی 4553 را جهت فعال شدن این آیسی به منفی منبع تغذیه وصل کنید.پایه 3و4 این آیسی نیز جهت تولید پالس به عنوان اسیلاتور می باشند.که با یک خازن 10 نانو فاراد به یکدیگر متصل می شوند.
اگر مثبت یک led را به پایه 14 وصل کنید.ومنفی آنرا به منفی منبع تغذیه، پس از اینکه عمل شمردن تا 999 انجام شد این led روشن می شود.در واقع این پایه،پایه overflow است.که با اتمام شمارش مقدار آن high می شود.وباعث می شود پس از عدد 999 هر سه led رقم صفر را نشان دهند.
در آیسی 4553 شما با عمل latch یا نگهداری اطلاعات،عمل overflow یا سرریز و با آیسی 4511 به عنوان یک آیسی مبدل bcd یا باینری به 7segment آشنا شدید.همچنین با نحوه درایو شدن آیسی 4553 توسط آیسی 4093 و کلیدهای push-bottm نیز آشنا شدید.
در آیسی 4553 پایه clock همیشه high است.، که با فشردن کلید push-bottom توسط شما این پایه low می شود.و در اولین بار شماره یک توسط این مدار ایجاد می شود.این شماره توسط پایه latch آیسی تا فشردن دوباره کلید نگهداری می شود.
پایه reset 4553 همیشه low است.،که با فشردن کلید push-bottom توسط شما high می شود .وباعث می شود عمل شمارش reset یا دوباره از اول آغاز شود.
مدار محاسبه فاصله از طریق امواج آلتراسونیک بوسیله میکروکنترلر
در این پروژه با نحوه بدست آوردن فاصله از طریق امواج آلتراسونیک آشنا می شوید.حداقل فاصله محاسبه شده توسط این مدار 28 سانتی متر و حداکثر آن 3.6 متر است.
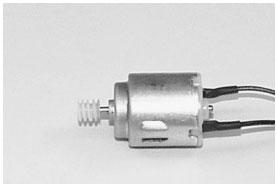
این سنسور به صورت دو pack مجزای گیرنده و فرستنده موجو د می باشد.این دو سنسور به صورت یک پک(pack) واحد نیز وجود دارد. فرکانس تولید شده توسط این سنسور 40 کیلو هرتز می باشد.به شماتیک درونی این سنسور در شکل زیر توجه کنید.
در این مدار از ویژگی تولید امواج (A/D) آنالوگ به دیجیتال این آیسی و ههچنین از آن جهت محاسبه و درایو کردن 7segment ها جهت نمایش فاصله نیز استفاده شده است.
این آیسی جهت تقویت امواج آلتراسونیک به میزان 60 دسی بل(db) در قسمت گیرنده مورد استفاده قرار می گیرد.
این آیسی جهت آشکار سازی امواج آلتراسونیک، در این مدار مورد استفاده قرار می گیرد.
امواج آلتراسونیک تقویت شده توسط دو آیسی فوق، توسط این آیسی hold یا نگهداری می شود.،و وارد میکروکنترلر می شود .،عملکرد این آیسی در این مدار به نوعی شبیه فلیپ فلاپ نوع D است.این آیسی همانطور که در شکل ملاحظه می کنید.، دارای 4 گیت NAND است.
این آیسی جهت تثبیت ولتاژ به میزان 5 ولت جهت مصارف قطعاتی که این حد از ولتاژ برای آنها تعریف شده مورد استفاده قرار می گیرد.
این آیسی نیز جهت تثبیت ولتاژ به میزان 9 ولت در مدار مورد استفاده قرار می گیرد.
این ترانزیستور از نوع npn است .،در این مدار ترانزیستور 1815 جهت درایو کردن آیسی 4069 (not buffer) با تغذیه 9 ولت مورد استفاده قرار می گیرد.،فعال شدن این ترانزیستور توسط میکروکنترلر انجام می گیرد.
این ترانزیستور از نوع pnp است.،و بیشتر جهت درایو کردن 7segmentوled مورد استفاده قرار می گیرد.
این آیسی دارای 6 عدد بافر not است.،در این مدار این آیسی جهت درایو کردن سنسور آلتراسونیک در قسمت فرستنده مورد استفاده قرار می گیرد.
خازنها در مدار جهت حذف جریان dc وعبور جریان متغییر مورد استفاده قرار می گیرد.،همچنین عمل حذف نویز را در مدار نیز انجام می دهند.خازنهای سرامیکی در فرکانسهای بالا کاربرد دارند.،خازنهای مولتی لایر نیز از نوع سرامیک هستند.با این تفاوت که تعداد لایه بیشتری دارند.و در فرکانسهای بالا عملکرد بهتری به خاطر چند لایه بودن از نوع سرامیکی دارند. خازنهای الکترولیتی بیشتر جهت حذف نویز در منابع تغذیه کاربرد دارند و دارای جهت مثبت و منفی هستند.،در هنگام اتصال آنها بر روی برد به جهت مثبت و منفی آنها دقت کنید.
در این مدار به نوع خازنها توجه کنید.سه نوع خازن مولتی لایر ، الکترولیت و سرامیکی مورد استفاده قرار گرفته است.همانطور که در نقشه ملاحظه می کنید.،این خازنها با حروف اولشان مشخص هستند.c نمایانگر خازن سرامیکی ، m نمایانگر خازن مو لتی لایر و E نمایانگر خازن الکترولیت است.
در زیر شکل مدار تقویت سیگنال را مشاهده می کنید.هنگامیکه امواج آلتراسونیک توسط سنسور گیرنده آلتراسونیک که در نقشه با RX مشخص شده است.،دریافت می شود.،به میزان 60 دسی بل تقویت می شو د.40 دسی بل در مرحله اول و 20 دسی بل در مرحله دوم تقویت می شو د.عمل تقویت به میزان 60 دسی بل را آیسی LM388 انجام می دهد.9 ولت ورودی توسط تقسیم ولتاژ دو مقاومت10K به میزان 4.5 ولت کاهش می یابد.،و وارد پایه مثبت آپ امپ می شود.
در زیر شکل مدار آشکار ساز را مشاهده می کنید.در این قسمت از مدار تنها نصف موج را پس از عبور از دیود خواهیم داشت.دیود دیگر منفی نصف موج حاصل شده را حذدف می کند.
dc موج و پوش آن نیز توسط خازن حذف می شود.
در قسمت بعدی مدار امواج پس از عبور از دیودها وخازن وارد پایه 3 آیسی LM358 می شود.همانطور که در شکل ملاحظه می کنید.، فیدبک در پایه منفی آپ امپ این آیسی وجود ندارد.در این حالت خروجی به سرعت به اشباع می رود.
بنابر قوانین مدار در تقسیم ولتاژ در مدارات سری ولتاژ ثابتی را در پایه منفی خواهیم داشت.زمانیکه ورودی مثبت که از قسمت قبلی مدار تحریک می شود.،ولتاژش اندکی بیشتر از VCC باشد.خروجی به سرعت در ولتاژ VCC قرار می گیرد.عکس این مطلب نیز وجود دارد.،زمانیکه ولتاژ در پایه 3 اندکی کمتر از ولتاژ در پایه 2 باشد.خروجی به سرعت صفر می شود.به شکل این قسمت از مدار در شکل زیر توجه کنید.
در این قسمت امواج وارد مرحله hold یا نگهداری می شوند.عملکرد این قسمت از مدار به نوعی شبیه به فلیپ فلاپ (flip flop) نوع D است.
قسمت انتقال امواج آلتراسونیک
در قسمت انتقال از آیسی معکوس کننده یا invertor استفاده شده است.در هر سر این سنسور دو بافر NOT به صورت موازی یا parallel با هم قرار دارند.این کار برای افزایش توان انتقال است.در پایه مثبت فاز اصلی ودر پایه منفی سنسور 180 درجه همان فاز را خواهیم داشت.خازن نیز در این قسمت جهت حذف جریان d c است.
نمایش فاصله
در این مدار از 3 عدد 7Segment جهت نمایش فاصله استفاده شده است.در این مدار 7segmentها از نوع آند مشترک هستند.
این 7segment دارای پایه مشترک مثبت است است.،که با منفی شدن پایه های a,b,c,d,e,f,g توسط میکروکنترلر فاصله را نشان می دهد.
سرعت صوت در دماهای مختلف متفاوت است.به طور مثال سرعت صوت در دمای صفر درجه سانتی گراد331.5m/s است.و سرعت صوت در دمای 40 درجه سانتی گراد355.5m/s است.سرعت صوت در دماهای مختلف از رابطه زیر تبعیت می کند.
|
X=V*T |
با توجه به فرمول سرعت،سرعت رابطه مستقیمی با زمان دارد.به طور مثال سرعت نور در دمای صفر درجه سانتی گراد331.5m/s است.،اگر فاصله ما تا دیوار 2m باشد.با احتساب برگشت نور 4m می شود.بنابراین مدت زمان برگشت موج به سنسور گیرنده از رابطه زیر حساب می شود.
|
X=V*T, T=4/331.5, T=0.01206 |
دانلود برنامه
برای کار با میکروکنترلر، برنامه HEX را از طریق پروگرامر میکروکنترلر های خانواده PIC در داخل میکروکنترلر LOAD کنید.
برای مشاهده مرجع وارد سایت زیر شوید
http://www.interq.or.jp/japan/se-inoue/e_pic6_6.htm
پس از بستن مدار قسمت فرستنده بر روی یک برد مجزا،قسمت گیرنده را نیز بر روی یک برد مجزا وصل کنید.،در این مدار بایست LED را حذف کرده،و به جای آن پین شماره 6 را که DSR می باشد.به جای LED به خروجی پایه 3 آیسی 555 وصل نمایید.پایه 3 را بار دیگر با یک مقاومت 3.3 کیلو به زمین متصل نمایید.زمانیکه شما پالسی را از مدار فرستنده ارسال کنید.قسمت گیرنده این پالس را دریافت کرده.و با دریافت این پالس پین DSR در استاندارد ارسال و دریافت RS232 فعال می شود.با HIGH شدن این پین و با توجه به برنامه ای که به زبان ویژوآل بیسیک نوشته شده است.، دریافت این پالس به کامپیوتر اطلاع داده می شود.،و کامپیوتر خاموش می شود.پین 5 کابل RS232 را به زمین تغذیه قسمت گیرنده وصل نمایید.و پین 4 یا DTR را برای مشاهده دریافت پالس توسط قسمت گیرنده به آند یا مثبت LED وصل کنید.سمت کاتد یا منفی LED را به زمین مشترک کابل با قسمت گیرنده متصل نمایید.در این حالت هر زمان که شما پالسی را در قسمت فرستنده ارسال کنید.در قسمت گیرنده علاوه برHIGH شدن پین DSR و Hibernate شدن سیستم،پین DTR نیز HIGH می شود.در واقع با این نوع طراحی شما می توانید.دریافت پالس را با روشن شدن LED نیز مشاهده کنید.
در مورد نحوه کار با استانداردRS232 و فهم بیشتر می توانید وارد لینک های زیر شوید.
شبیه ساز ی المانهای منطقی توسط کامپیوتر و استاندارد RS232
کنترل موتور پله ای
کنترل ساده یک LED توسط کامپیوتر
همانطور که می بینید.، در قسمت general تابع منطقی SetSuspendState معرفی شده است.این تابع جز lib یا کتابخانه powrprof.dll است.که دارای سه مقداردهی boolean یا منطقی است.این سه مقدار به شرح ذیل می باشد. Hibernate،ForceCritical و DisableWakeEvent که تمامی این عبارات boolean هستند.و تنها مقادیر TRUE و FALSE را می گیرند.
البته نحوه معرفی تابع SetSuspendState در زبان های مختلف متفاوت است.و این نوع تعریف مختص VB می باشد.
حال به معرفی عناصر بکار رفته در این تابع می پردازیم.
Hiberanate ،با اعلام این عبارت به صورت TRUE کامپیوتر hibernate می شود.در صورتی که این عبارت False باشد.کامپیوتر حالت Suspend یا معلق را دارد.
ForceCritical ،در صورت TRUE بودن این عبارت کامپیوتر به سرعت و بی درنگ خاموش می شود.در حالت FALSE بودن اگر کاربرهای دیگری به این سیستم متصل باشند آنها را از Hibernate شدن این سیستم مطلع می کند.
DisableWakeEvent، در صورت TRUE بودن این عبارت کامپیوتر با هر وقفه یا INTERRUPT به حالت Hibernate می رود.این وقفه می تواند.،تکان خوردن موس باشد.
به نحوه مقدار دهی این تابع در دستور شرطی IF نگاه کنید.
پس خط اول برنامه به معرفی این تابع می پردازد.در خط LOAD برنامه،پورت سریال باز می شود.که buadrate یا نرخ ارسال دریافت در آن 80 است.در صورتی که در این پورت وسیله دیگری مثل موس باشد با پیغام خطایی مبنی بر اینکه این پورت آزاد نیست.مواجه خواهید شد.
در قسمت Form_Unload پورت سریالی که باز شده با بستن برنامه توسط کاربر و دستور CLOSECOM بسته خواهد شد.
در قسمت تایمر نیز برنامه همواره آماده است.تا پالس را که شما از دستگاه فرستنده ارسال می کنید.،را دریافت کند.در واقع اگر شما این پالس را بفرستید.پین DSR مقدار 1 را دریافت می کند.در این هنگام پین DTR نیز HIGH یا یک می شود و LED متصل به آن روشن می شود.استفاده از پین DTR صرفا جهت نشان دادن دریافت پالس در گیرنده و اطمینان شما از دریافت پالس می باشد.در این هنگام تابع SetSuspendState نیز اجرا می شود و سیستم را بی درنگ خاموش می کند.
در دستور شرطی IF بعدی بیان شده که در صورت دریافت نشدن پالس پین DTR بی دلیل HIGH نشود.
1: 2: Private Declare Function SetSuspendState Lib "powrprof.dll" (ByVal Hibernate As Long, ByVal ForceCritical As Long, 3: ByVal DisableWakeEvent As Long) As Long 4: 5: Private Sub Form_Load() 6: If OPENCOM("COM2:80,N,8,1") = 0 Then MsgBox "COM2 not free" 7: End Sub 8: 9: Private Sub Form_Unload(Cancel As Integer) 10: CLOSECOM 11: End Sub 12: 13: 14: Private Sub Timer1_Timer() 15: If DSR = 1 Then 16: DTR 1 17: SetSuspendState True, True, False 18: End If 19: If DSR = 0 Then DTR 020: End Sub
دراین پروژه با نحوه عملکرد روبات دنبال کننده مسیر آشنا می شوید.
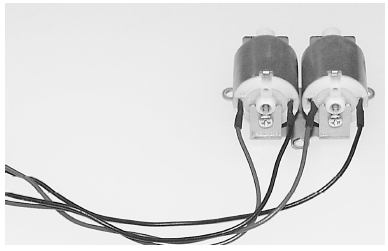
این سنسور به صورت یک بسته حاوی دو عدد سنسور مادون قرمزاست. یک سنسور فرستنده و سنسور دیگر گیرنده می باشد.برای اینکه روبات شما بهتر کار کند بهتر است بجای استفاده از دو سنسور مادون قرمز به صورت مجزا از این packeg سنسور استفاده کنید.در این سنسور پایه های بلندتر در هر سمت سمت آند و پایه های کوتاهتر سمت کاتد است.
برای دریافت اطلاعات مربوط به این سنسور اینجارا کلیک کنید.
با استفاده از این نوع سنسور میزان خطاها تا حد قابل ملاحظه ای کاهش می یابد.
این میکرو کنترلر از ساده ترین انواع میکروکنترلر از لحاظ برنامه نویسی است .اما فوق العاده قدرتمند می باشد.زبان برنامه نویسی این میکروکنترلرغالبا زبان برنامه نویسی سی(C)زبان برنامه نویسی بیسیک(BASIC)
زبان برنامه نویسی پاسکال (PASCAL) میباشد.که شما می توانید با تهیه کمپایلر هر کدام از این زبانها،با برنامه ای که به آن تسلط دارید.، اقدام به برنامه نویسی آن کنید.
برای کار با این میکروکنترلر احتیاج به پروگرامر خانواده گروه PIC دارید.،به همراه کمپایلر زبان برنامه نویسی که به آن علاقه دارید.
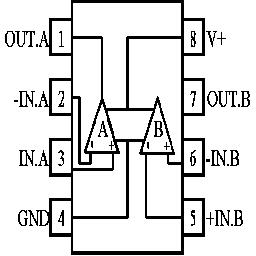
این آیسی حاوی دو عدد آپ امپ(DUAL AP-AMP)است.،این آپ امپ ها جهت مقایسه ولتاژ های ایجاد شده از سنسورها به کار می رود.پایه 4 آن منفی ،پایه 8 آن مثبت،پایه 2 و6ورودی منفی پایه 3و5 ورودی مثبت،وپایه های 1و7 خروجی است.این آیسی اختلاف ولتاژهای منفی ومثبت ورودی را در خروجی آشکار می کند.
آیسی ULN2803 حاوی بافر NOT است پایه 9 آن تغذیه منفی و پایه 18 آن تغذیه مثبت است.جریان خروجی آن در حدود 500 میلی آمپر است.این آیسی بیشتر برای درایو کردن موتور پله ای (STEPPER MOTOR) مورد استفاده قرار می گیرد
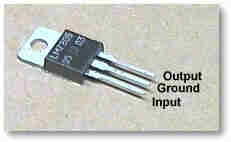
رگولاتور LM7805 یک تنظیم کننده ولتاژ است.زمانیکه ولتاژ پایه ورودی آن در حدود 2 تا 2.5 ولت بیشتر از 5 ولت باشد.،ولتاژ تنظیم شده 5 ولت را در خروجی ایجاد می کند.
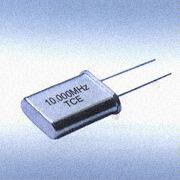
کریستال جهت تولید پالس برای میکروکنترلر مورد استفاده قرار می گیرد.در شکل زیر کریستال 10 مگاهرتز را مشاهده می کنید.
در شکل زیر نحوه اتصال سنسور CNY70 به آیسی LM358 را مشاهده می کنید.سمتی از این سنسور که نوشته دارد پایه بالا یی و پایینی مربوط به LED فرستنده و دو پایه قسمتی که نوشته ندارد.،مربوط به گیرنده است.پایه بالایی قسمتی که نوشته دارد.،به تغذیه 5 ولت و پایه زیر این پایه را با یک مقاومت 220 اهم به منفی وصل کنید.قسمتی از این سنسور که نوشته ندارد.پایه بالایی را به تغذیه 5 ولت و پایه پایینی را با یک مقاومت 5 مگا اهم به منفی وصل کنید.از اشتراک مقاومت 5 مگا اهم با پایه پایینی قسمت گیرنده سنسور به ورودی مثبت آیسی LM358 که پایه 3 می باشد وصل کنید.
یک سر پتانسیومتر 10K را به مثبت 5 ولت ویک سر دیگر آن را به منفی منبع تغذیه یا باطری وصل کنید.سر دیگر پتانسیومتر را به ورودی منفی آیسیLM358 که پایه 2 می باشد.، وصل کنید.پایه 4 آیسی LM358 را به منفی ،پایه 8 آیسی LM358 را به مثبت منبع تغذیه وصل کنید.،پایه 1 آیسی LM358 را توسط مقاومت 220 اهم به ورودی پایه های میکروکنترلر وصل کنید.این کار را برای هر سه سنسور CNY70 انجام دهید.
همانطور که در نقشه نگاه می کنید.پایه های خروجی آیسی LM358 توسط مقاومتهای 220 اهم به پایه های RB3,RB1,RB2 میکروکنترلر وصل می شوند.میکروکنترلر بر اساس HIGH یا LOW شدن این پایه ها تصمیم گیری می کند.،وپایه های RB6 یا RB7 را که به یک سر موتور وصل هستند. را HIHG یا LOW می کند.دیود در خروجی آیسی ULN2803 نقش محافظتی را دارد.خازنهای دو سر موتور نیز جهت از بین بردن نویز وکارکرد بهتر موتور مورد استفاده قرار می گیرند.البته در عمل یکی از خروجی هاآیسی LM358 از پایه 7 این آیسی گرفته شده است.پایه 5 میکروکنترلر را حتما به تغذیه منفی وصل کنید.
با تنظیم پتانسیومترها می توانید.،فاصله وحساسیت سنسورها را تعیین کنید.قبل از اینکه سنسورها را در زیر ماشین روباتی خود بگذارید.از سالم بودن وعملکرد صحیح سنسورها مطمئن شوید.قبل از هر کاری مدار خود را بر روی برد بورد پیاده سازی کنید.وخرجی دو عدد آیسی LM358
را که پایه های 1 و7 و1 می باشندرا توسط مقاومتهای 220 اهم به صورت مجزا به سه LED وصل کنید.زمانیکه کاغذ سفید رنگ را به قسمت بالایی این سنسورها نزدیک می کنید.،LED مربوط به هر سنسور روشن می شود.شما می توانی با تنظیم پتانسیومترها شدت نور LED ها و میزان فاصله پاسخگویی سنسورها را تعیین کنید.زمانیکه از عملکرد صحیح سنسورها وتنظیم آنها مطمئن شدید سه خروجی آیسی LM358 را به ورودیهای RB3,RB2,RB1 از میکروکنترلر وصل کنید.تصمیم گیری میکروکنترلر بر اساس HIGH یا LOW شدن این پایه های میکروکنترلر می باشد.،خروجیهای RB6,RB7 میکروکنترلر را قبل از اتصال به پایه های 1و2 ورودی آیسی ULN2803 به دو عدد LED وصل کنید وپس از مطمئن شدن از عملکرد صحیح برنامه ای که در میکروکنترلر توسط پرگرامر LOAD شده است آترا به ورودی 1و2 آیسی وصل کنید.،سپس خروجی 18 آیسی ULN2803 را به سر یک موتور وسر دیگر موتور را به مثبت منبع تغذیه وصل کنید.در واقع میکروکنترلر منفی یک سر موتور را می دهد.،خروجی 17 آیسی ULN2803 را به یک سر موتور دیگر وصل کنید.،وسر دیگر این موتور را به مثبت منبع تغذیه وصل کنید.
برای تغذیه مدار از 6 عدد باطری 1.2 ولت آمپر بالا استفاده کنید.قبل از اتصال باطری به روبات عمل تغذیه را توسط منبع تغذیه DC انجام دهید.،واز سیمهای سوسماری بلند جهت اتصال مثبت ومنفی منبع تغذیه به روبات استفاده کنید.
در این مدار بهتر است.،از رگولاتور 7805 استفاده کنید.،تغذیه مثبت کل مدار به غیر از موتورها از رگولاتور 7805 می باشد.،اگر تغذیه موتورها را از رگولاتور 7805 بگیرید.موتورها آمپر لازم را جهت حرکت کردن نخواهند داشت.
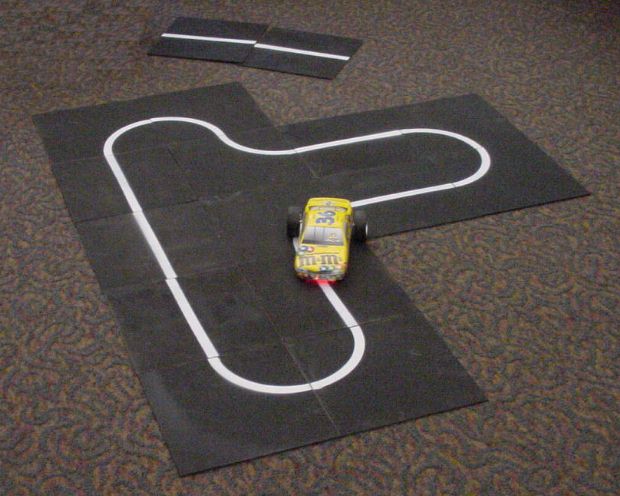
برای درست کردن مسیری که روبات بتواند در آن صحیح حرکت کند و مسیر را درست تشخیص دهد.،حداقل از دو عدد مقوای مشکی استفاده کنید .،وجاده خود را که ورق سفید رنگ براق است.،
را بر روی آن بچسبانید.
جاده شما نباید دارای پیچهای 90 درجه باشد.،واندازه ورق سفید که جاده شما می باشد حدودا 2.5 سانتی متر باشد.سنسورها را طوری کنار یکدیگر قرار دهید.،که فاصله اولین سنسور با آخرین سنسور حدود 4.5 سانتی متر باشد.سنسور وسطی در جاده سفید رنگی که بر روی مقوای مشکی درست کرده اید.،قرار می گیرد.ما دامی که این سنسور برروی این خط سفید باشد.دو موتور همزمان حرکت می کنند.زمانیکه این سنسور به همراه یکی از سنسورهای کناری یا یکی از سنسورهای کناری به طور مجزا بر روی خط سفید قرار می گیرد.،یکی از موتورها خاموش می شود.،وموتور دیگر روشن می شود.،تا اینکه روبات بتواند.،مسیر صحیح خود را پیدا کند.و دو موتور بتوانند به طور همزمان حرکت کنند.اگر شما این موارد را رعایت کنید.،مطمئن باشید که روبات شما صحیح عمل خواهد کرد. سعی کنید برای اولین تست جاده شما به صورت بیضی باشد.اندازه جاده شما می بایست متناسب با اندازه روبات شما باشد.
جاده شما می تواند مشکی نیز باشد.،فقط نحوه برنامه نویسی میکروکنترلر متفاوت خواهد بود.
نقشه مدار
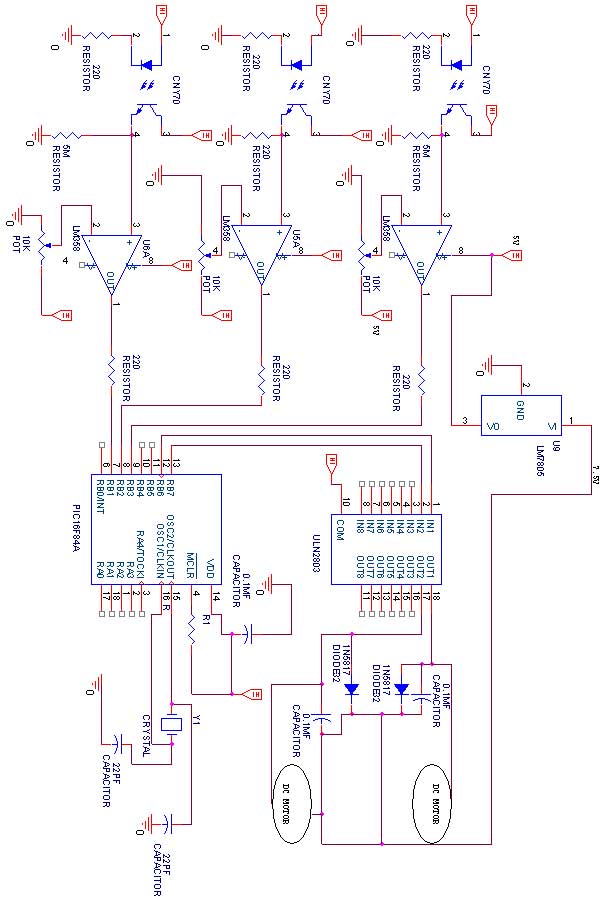
برنامه میکروکنترلر در این پروژه به زبان بیسک است.
همانطور که در برنامه مشاهده می کنید.،سه عدد متغییر m,l,r در اول برنامه معرفی شده اند.،این سه متغییر در خطوط بعدی برنامه توسط پورتهای،portb.1,portb.2 ,portb.3 بارگذاری می شوند.،high یا low شدن این پورتها به صورت مستقیم وابسته به سنسورهای CNY70 است.،در صورت HIGH شدن سنسور وسطی دو موتور HIGH می شوند.،وحرکت خواهند داشت.HIGH یا LOW شدن هر کدام از موتورها سمت راست یا چپ یا هر دو موتور در برنامه کاملا مشخص شده است.
1: 2: m var byte 3: l var byte 4: r var byte 5: m=portb.2 6: l=portb.1 7: r=portb.3 8: if m=1 and l=0 and r=0 then 9: high portb.6 10: high portb.7 11: endif 12: if r=0 and l=1 and (m=0 or m=1) then 13: high portb.7 14: low portb.6 15: endif 16: if l=0 and r=1 and (m=0 or m=1) then 17: high portb.6 18: low portb.7 19: endif
برای کار با میکروکنترلر احتیاج به دو مرحله دارید.اول کمپایل کردن برنامه ای که به طور مثال با زبان بیسیک نوشته شده.دوم پروگرام کردن آیسی،برای کمپایل کردن میتوانید.ورژن 2.32 این کمپایلر را در خط زیر دانلود کنید.
برای دانلود برنامه کمپایلر بیسیک اینجا را کلیک کنید.
پس از اینکه این فایل فشرده را باز کردید.به مراحلی که راجب نصب گفته شده دقت کنید.تا این برنامه درست نصب شود.
شما می توانید برنامه تان را در محیط edit داس (dos) یا در محیط word یا notpad ویندوز وارد کنید.پس از وارد کردن برنامه بهتره آنرا در محلی که برنامه کمپایلر را نصب کردید وفایل pbp.exe در آن وجود دارد.با پسوندbas ذخیره کنید.pbp مخفف pic basic pro compiler است.برای کمپایل کردن برنامه پیشنهاد میکنم به جای استفاده از محیط ویندوز وارد محیط command بشوید ومسیری که برنامه کمپایلر را در آن ذخیره کردید با استفاده از دستورات dos پیدا کنید.این محیط می بایست شامل فایلpbp.exe باشد.اگر برنامه تان نیز در همین مسیر باشد.احتیاجی به دادن مسیر یا path برنامه ندارید.pbp را تایپ می کنید.بعد از آن با یک فاصله علامت - وسپس بدون فاصله نام میکرو مورد نظر از خانواده PIC را وارد می کنید.حال نام برنامه را وارد کنید پسوند bas آنرا فراموش نکنید.به طور مثال اگر برنامه شما وکمپایلر در مسیری مانند مسیر روبرو قرار گرفته باشند.و اسم برنامه ای که نوشته ای به طور مثال blink با پسوند bas باشد.،داریم. c:\pic\pic1\pbp -16f84a blink.bas در اینجا فرض کردیم میکرو از نوع PIC16F84A است.اگر میکرو PIC16F873 باشد.به جای 16F84A- خواهیم داشت 16F873- اگر برنامه بدون خطا باشد.فایل HEX آن در درایو ی که برنامه در آن قرار دارد.ایجاد می شود.حال می توانید آنرا از طریق پروگرامر وارد میکرو کنید.در پروگرامر نیز نوع میکرو را حتما درست انتخاب کنید.وبه دستورات و نحوه استفاده از پروگرامری که تهیه کرده اید.به دقت توجه کنید.
متاسفانه من دوربین در اختیار نداشتم تا از روباتی که ساختم برای شما عزیزان فیلم تهیه کنم.به همین خاطر دو فیلمی که مربوط به دو روبات هست.، را از اینترنت پیدا کردم تا شما عزیزان با نحوه کار اینگونه روبات ها بیشتر آشنا بشوید.
sandvich robot
lego robot
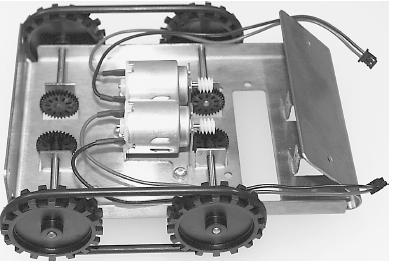
همانطور که در شکل مشاهده می کنید.،پس ازلحیم کردن سیم به سر موتورها برای جلوگیری از برخورد سیمها به یکدیگر از وارنیش استفاده شده است.شما می توانید برد الکترونیکی خود را بر روی این روبات نمونه پیاده سازی کنید.
در قسمت جلویی این روبات ، طلقی L شکل را قرار دهید.،و محل پیچ شدن آنرا به روبات با مته 3 سوراخ کنید.، و با سوراخ کردن آن به صورت عرضی به آن قابلیت رگلاژ شدن بدهید.،سپس آنرا با پیچ و مهره 3 به قسمت جلوی روبات متصل کنید.
سنسورهای CNY70 بر روی برد مسی به گونه ای لحیم کنید.،که فاصله اولین سنسور با آخرین سنسور حدود 4.5 سانتی متر باشد.این سنسورها می بایست در وسط یکی از عرضهای برد مسی لحیم شود.سرهای مثبت سنسورهای CNY70 را به یکدیگر لحیم کنید.،سپس این سر مشترک را با سیم به یک سر کانکتور مخابراتی که بر روی برد مسی لحیم شده است.،لحیم کنید.این کار را برای تمامی پایه های سنسورها انجام دهید.،وآنها را به کانکتور مخابراتی دیگری که روی بدنه روبات قرار گرفته متصل کنید.برد مسی را که سنسورها روی آن قرار دارند.،را به زیر طلق L شکل متصل کنید.و با استفاده از کانکتور مخابراتی 7 پین به برد الکترونیکی که بر روی این روبات یا هر روبات دیگر سوار کرده اید.،متصل کنید
در واقع این قسمت کار مسیر یابی روبات شما را انجام میدهد.