رباتهای انسان یاب ژاپن قدرت خود را به رخ سونامی کشاندند
در پی بروز زلزله و سونامی هولناک اخیر در ژاپن و برجاگذاشتن ویرانیهای عظیم و صدها کشته و مفقود، فناوری مدرن این کشور برای ردیابی بازماندگان فاجعه و تعدیل خسارات تا جای ممکن به کمک آنها آمده است
زلزله شناسان همچنان از پیشگویی زمینلرزه حتی در بازههای زمانی طولانی ناتوانند بنابراین بهترین کار ممکن در حال حاضر توسعه تاکتیکهای جستوجو و نجات پس از زلزله است.
دو منطقه زلزلهخیز جهان به صورت بسیار جالبی جزء دو قدرت بزرگ مهندسی روباتیک هستند. کشور ژاپن در حلقه آتش اقیانوس آرام واقع شده که در آن صفحات تکتونیکی اقیانوس آرام و اروپاییآسیایی با هم برخورد میکنند. این کشور به طور متناوب در خطر زلزله قرار دارد. از این رو به عنوان یکی از قدرتهای فنی دنیا به ساخت دستگاههای خاص مواقع زلزله پرداخته است.
این امید وجود دارد که دستگاههای پیشرفتهای مانند آنچه در این گزارش آمده بتوانند آثار تخریبی زلزله را در آینده کاهش دهند.
منطقه دیگر زلزلهخیز دنیا کالیفرنیای امریکا است که محققان آنجا هم به فناوریهای فوقالعادهای برای مقابله با اثرات زلزله دست یافته اند.
روبوکو، روبات امدادی اداره آتشنشانی توکیو
این روبات برای مکانیابی و بازیابی سالم مجروحان از مکانهای حادثهدیده به ویژه محلهای بمبگذاری شده طراحی شده است، اما از آن میتوان برای حوادث طبیعی نیز استفاده کرد.
این روبات برای مکانیابی انسانها از حسگرهای مافوقصوت استفاده کرده، سپس به آرامی مجروح را به یک وسیله نقلیه برای انتقال آن به محل امن منتقل میکند. روبوکو همچنین از یک کپسول اکسیژن برخوردار است.
روبات هشت متری مارشکل
این روبات بیشتر در بخش جستوجو کاربرد دارد. این روبات هشت متری خود را با سیخهای نایلونی موتوری به جلو میراند.

روبات هشت متری مارشکل
این روبات تنها میتواند چهار سانتیمتر در ثانیه حرکت کند اما در زاویههای تیز وارد شده، از شیبهای 20 درجه بالا رفته و خود را از شکافهای کوچک عبور میدهد. این روبات از چشمان دوربینی برخوردار است که میتواند تصاویر محل را برای محققان فرستاده و آنها را از موقعیت آگاه کند.
روبات امنیتی خزنده
این روبات که تا حد زیادی به یک تابوت تانک شکل تشابه دارد در حقیقت کاربردی کاملا متفاوت داشته و قادر است در هر زمان یک مجروح را به جای امن انتقال دهد. این روبات که برای اداره پلیس یوکوهامای ژاپن ساخته شده، قادر است یک فرد 113 کیلوگرمی را در یک پوسته ایمنی جابجا کند.

این روبات خزنده از قابلیت کنترل از راه دور و همچنین از حسگرهایی برخوردار است که بر جریان خون و سایر علائم حیاتی مجروح نظارت میکند.
امدادگر اسکیتسوار
پرفسور شیگئو هیروسه در موسسه فناوری توکیو دست به ساخت روباتی زده که زیستشناسی ارگانیک را برای شناسایی راه بهتر حمل و انتقال بررسی میکند. هنگامی که این روبات مجبور به حرکت در زمینهای ناهموار میشود، پاهای آن برای کار در شرایط خاص هماهنگ میشود.
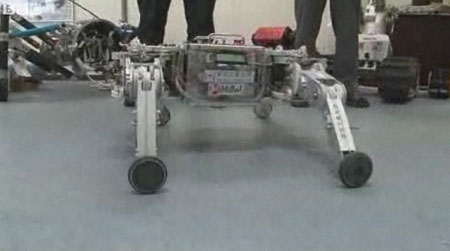
در زمینهای صاف نیز پاهای آن به صورت چرخدار درآمده و حرکت آن را سادهتر و سریعتر میکند.
حسگر تنفسی
روبات کوئینس، روباتی کوچک اما کاراست که توسط موسسه فناوری چیبا ساخته شده است. این روبات از چهارچرخ و شش موتور الکتریکی و همچنین یک بازوی موتوری با قابلیت جابجایی غذا و سایر تدارکات برخوردار است.

کوئینس همچنین از حسگرهای مادونقرمز و دیاکسیدکربن برای تشخیص تنفس و گرمای بدن انسان برخوردار است
![]()
* کابل اتصال SATA در کامپیوتر و اشتباه معمول کاربران
* استفاده از GPS اکسترنال برای یک گوشی ویندوز موبایل
* گذری بر مدولاسیونهای AM و FM
* مختل كننده های تلفنهای همراه
* OP AMP چیست؟
* مایکروویو خطرناک برای شیر کودکان
* تقویت كننده های عملیاتی
* خرابی لینکها در وبلاگ ما
* مبدل آنالوگ به دیجیتال(A/D Converter) توسط میکروکنترلر AVR
* ارتباط سریال با میکرو کنترلرAVR از طریق RS232
* مقالات و پروژه های AVR
* چشم الکترونیکی برای وقتی که چشم های ما بسته است
* از امواج رادیویی و تقسیم بندی باندها و فرکانسها چه می دانید
* معرفی کامل گرایش های مهندسی برق
* منابع کنکور کاردانی به کارشناسی برق - الکترونیک
* فرمولهای ریاضی
* همه چیز درباره پل وتستون
* بیایید با هم یک MP3 Player بسازیم
* دماسنج دیجیتال Segment7 با میکروکنترلر AVR














